蘇州安塞爾機械有限公司
Suzhou Auncel Machinery Co., Ltd.
聯系人:曹經理
手 機:18136152978
電 話:0512-53835743
網 址:cxczlm.cn
郵 箱:auncelmachine@163.com
地 址:蘇州市常熟市沙家浜鎮北新路12號
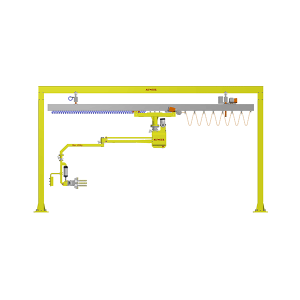
助力機械手通常用作機床或其他機器的附加設備,如在主動機床或主動生產線上裝卸和傳遞工件,在加工中心中替換刀具等,通常沒有獨立的操控設備。那么,助力機械手四種運動方式是什么
1、直移型
這種運動型式的機械手其臂部只具有沿三個直角坐標作直線移動的活動度,即臂部僅僅作彈性升降和平移等運動,它的運動規模的圖形可所以一條直線一個矩形平面或一個長方體。這種型式的機械手布局簡略,運動直觀性強,便于完成必定的精度要求,但其占有的空間方位大相應的工作規模較小。

2、屈伸型
這種運動型式的機械手,臂部有大臂和小臂兩部分,除了大臂具有水平反轉和俯仰活動度外,小臂相對大臂還有一俯仰運動。從形態上看,小臂相對大臂作屈伸運動,根據此特征稱之為屈伸型,它的運動規模圖形為球體。
3、俯仰型
這種運動型式的機械手其臂部除了具有水平反轉這個活動度外,還具有臂部俯仰這一活動度,這兩個活動度與臂部彈性活動度構成一個完好的俯仰型機械手,它的運動規模圖形為一空心圓球特征運動為俯仰,為便利起見稱俯仰型。通常將只具有臂部俯仰而無臂部反轉活動度的機械手稱為俯仰型,因為其布局與俯仰型挨近。