蘇州安塞爾機械有限公司
Suzhou Auncel Machinery Co., Ltd.
聯系人:曹經理
手 機:18136152978
電 話:0512-53835743
網 址:cxczlm.cn
郵 箱:auncelmachine@163.com
地 址:蘇州市常熟市沙家浜鎮北新路12號
(1)高的出產功率,前進出產功率,有必要控制出產節奏。除了固定的出產加工時間不能改善,主動上、下材料來代替人工操作,所以它可以極好的控制著節拍,避免因人為因素影響出產節奏,大大前進了出產功率。
(2)活絡的流程批改:咱們可以批改程序和手爪夾、靈敏改變的出產過程、調試速度,消除了員工練習時間,可以靈敏投入出產。
(3)前進工件的質量外觀:機器人主動出產線,從喂食、夾緊和切割完全由機器人來結束,削減中間環節、部件質量大大前進,特別是工件外表更漂亮。

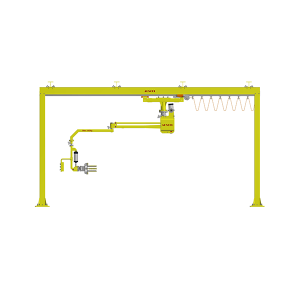
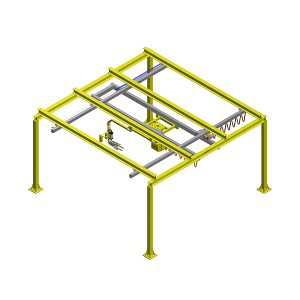
助力機械臂的用途
在工業主動化出產,無論是單一或組合機床和主動出產流水線,是用來結束工件機械手取放。控制機械手的首要方位辨認、方向控制和材料的存在。它的任務是工件或傳送帶上的東西,移動到傳送帶,
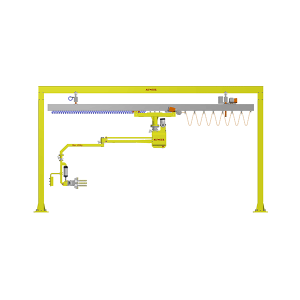
機械臂的上、下、左、右把握和放松是結束三雙線圈電磁閥氣動缸。當電磁閥功率,咱們堅持相應的行為,即使線圈功率依然再一次,直到相反方向的線圈電流和相應的行為。設備配備上,下,左,右,拿六、放松約束開關和控制相應的終究一步。皮帶有光開關、監測工件到位與否。
機械臂是仿照人的手部動作,依據一個給定的程序、軌跡和懇求獲取、處理和操作的主動設備。它特別是在高溫、高壓、粉塵、易燃、易爆、放射性等惡劣環境中,以及重,單調、一再的操作,而不是家庭作業,因此取得日益廣泛的運用。機械手一般由執行機構、驅動系統、控制系統和檢驗設備三有些構成,智能機器人現已感觸系統和智能系統